This content has been machine translated dynamically.
Dieser Inhalt ist eine maschinelle Übersetzung, die dynamisch erstellt wurde. (Haftungsausschluss)
Cet article a été traduit automatiquement de manière dynamique. (Clause de non responsabilité)
Este artículo lo ha traducido una máquina de forma dinámica. (Aviso legal)
此内容已经过机器动态翻译。 放弃
このコンテンツは動的に機械翻訳されています。免責事項
이 콘텐츠는 동적으로 기계 번역되었습니다. 책임 부인
Este texto foi traduzido automaticamente. (Aviso legal)
Questo contenuto è stato tradotto dinamicamente con traduzione automatica.(Esclusione di responsabilità))
This article has been machine translated.
Dieser Artikel wurde maschinell übersetzt. (Haftungsausschluss)
Ce article a été traduit automatiquement. (Clause de non responsabilité)
Este artículo ha sido traducido automáticamente. (Aviso legal)
この記事は機械翻訳されています.免責事項
이 기사는 기계 번역되었습니다.책임 부인
Este artigo foi traduzido automaticamente.(Aviso legal)
这篇文章已经过机器翻译.放弃
Questo articolo è stato tradotto automaticamente.(Esclusione di responsabilità))
Translation failed!
配置机器人签名设置
您可以在机器人签名设置中配置以下设置:
-
配置机器人允许列表
-
配置机器人屏蔽列表
-
为 IP 信誉配置 CAPTCHA
-
每秒机器人交易量 (TPS)
使用 NetScaler GUI 配置机器人允许列表
这种检测技术使您能够绕过配置为允许的 URL 的 URL。完成以下步骤以配置允许列表 URL:
- 导航到安全 > NetScaler 机器人管理和配置文件。
- 在 NetScaler 机器人管理配置文件页面上,选择一个文件并单击“编辑”。
- 在 NetScaler 机器人管理配置文件页面上,转到签名设置部分,然后单击允许列表。
- 在“允许列表”部分中,设置以下参数:
- 已启用。选中该复选框可在检测过程中验证允许列表 URL。
- 配置类型。配置允许列表 URL。机器人检测期间会绕过该 URL。单击“添加”将 URL 添加到机器人允许列表中。
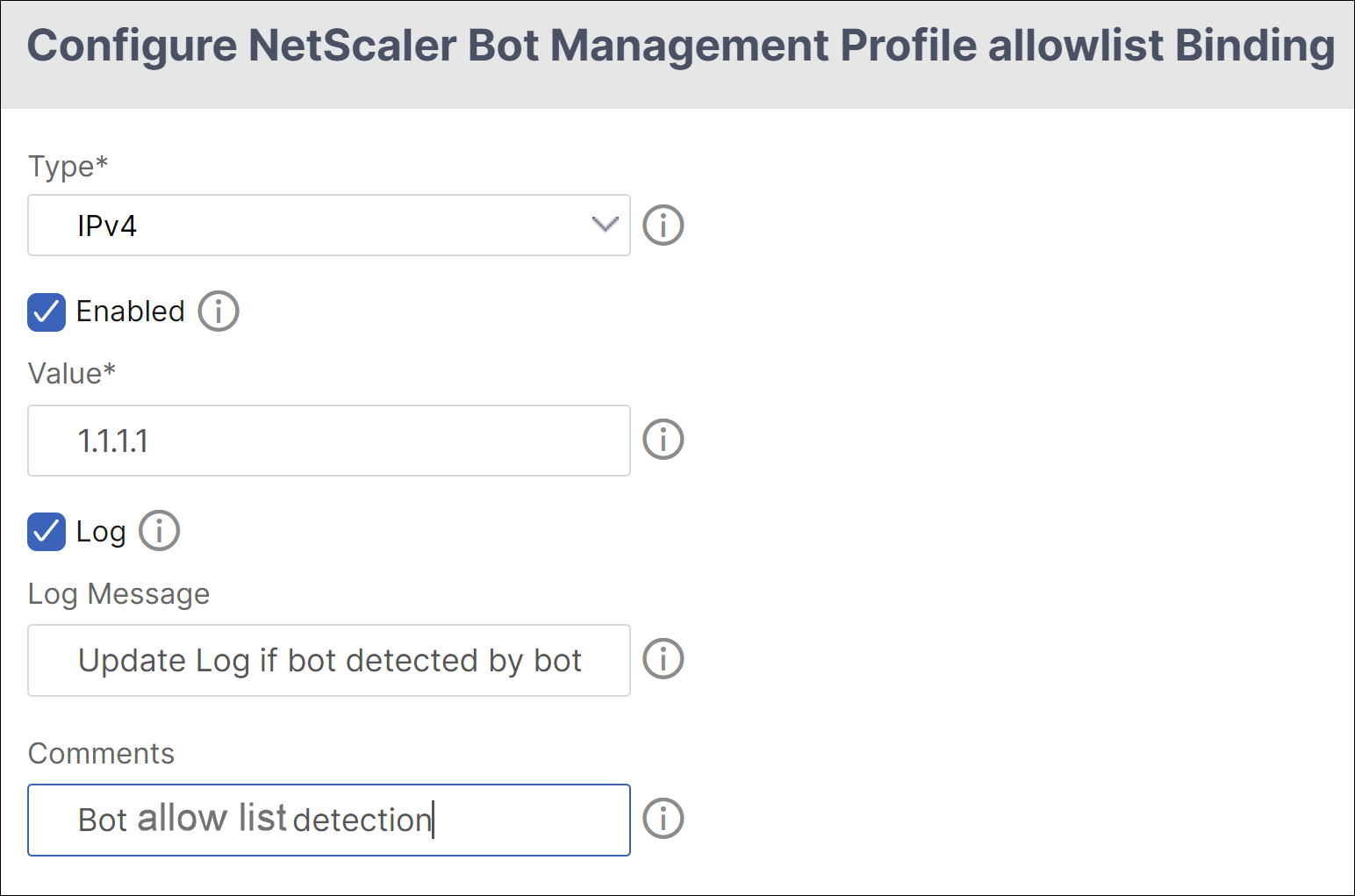
- 在 配置 NetScaler 机器人管理配置文件白名单绑定页面中,设置以下参数:
- 类型。URL 类型可以是 IPv4 地址、子网 IP 地址或与策略表达式匹配的 IP 地址。
- 已启用。选中复选框以验证 URL。
- 值。URL 地址。
- 日志。选中该复选框以存储日志条目。
- 日志消息。日志的简要说明。
- 评论。关于允许列表 URL 的简要说明。
- 单击确定。
- 单击更新。
- 单击 Done(完成)。
使用 NetScaler GUI 配置机器人阻止列表
这种检测技术使您能够删除配置为屏蔽的 URL 的 URL。完成以下步骤以配置阻止列表 URL。
- 导航到安全 > NetScaler 机器人管理和配置文件。
- 在 NetScaler 机器人管理配置文件页面上,选择签名文件并单击“编辑”。
- 在 NetScaler 机器人管理配置文件页面上,转到签名设置部分,然后单击阻止列表。
-
在“阻止列表”部分中,设置以下参数:
- 已启用。选中该复选框可在检测过程中验证阻止列表 URL。
- 配置类型。将 URL 配置为机器人阻止列表检测过程的一部分。这些 URL 在机器人检测期间会被丢弃。单击“添加”将 URL 添加到机器人屏蔽列表中
-
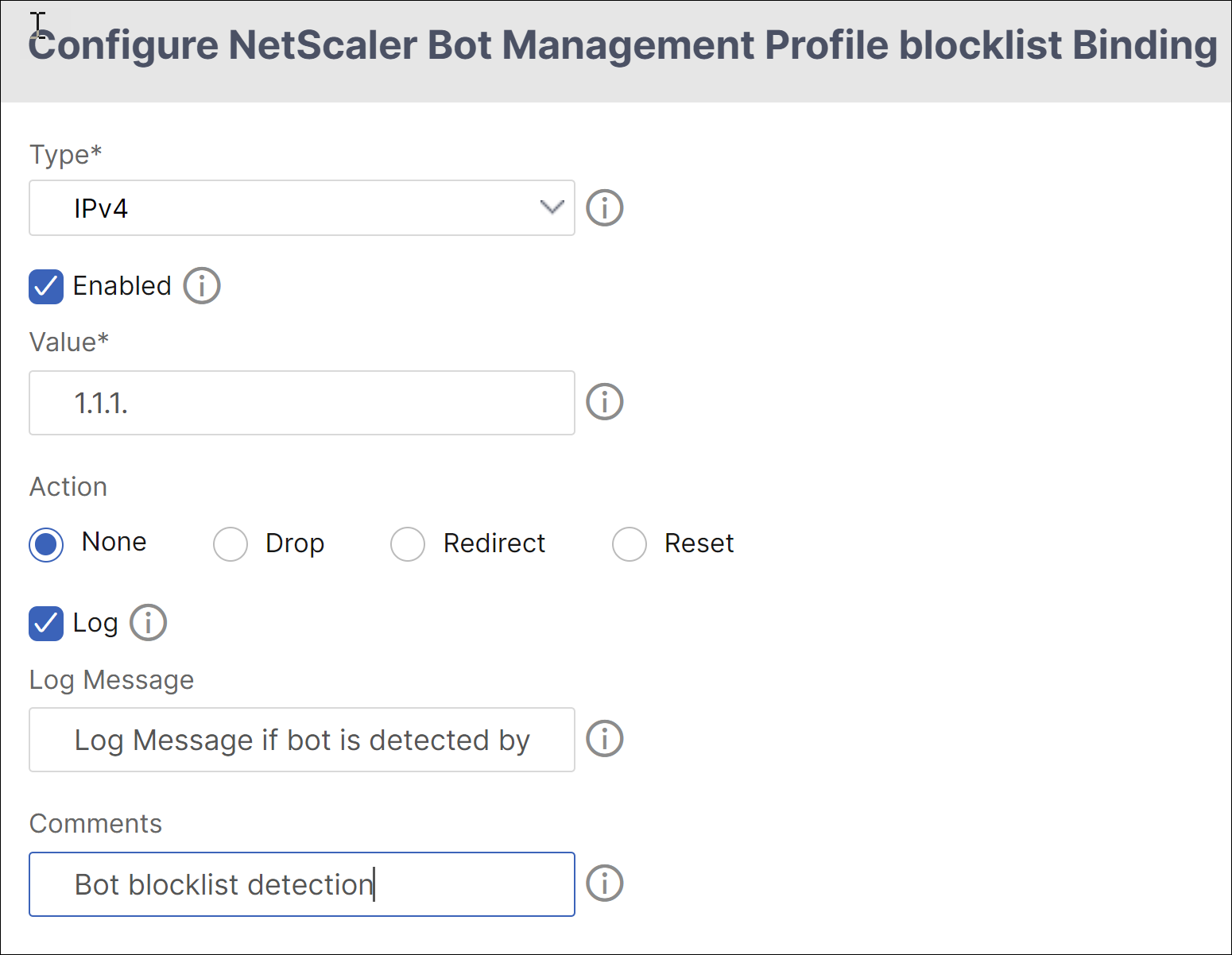
在“配置 NetScaler 机器人管理配置文件阻止列表绑定”页面中,设置以下参数。
- 类型。URL 类型可以是 IPv4 地址、子网 IP 地址或 IP 地址。
- 已启用。选中复选框以验证 URL。
- 值。URL 地址。
- 日志。选中该复选框以存储日志条目。
- 日志消息。登录的简要说明。
- 评论。关于阻止列表 URL 的简要说明。
- 单击确定。
- 单击更新。
- 单击 Done(完成)。
为 IP 信誉配置 CAPTCHA
CAPTCHA 有助于阻止导致 Web 应用程序安全违规的自动机器人。在 NetScaler 中,CAPTCHA 使用质询-响应模块来识别传入的流量是否来自人类用户而不是自动机器人。
CAPTCHA 在 NetScaler 机器人管理中的工作原理
在 NetScaler 机器人管理中,CAPTCHA 验证配置为在评估机器人策略后运行的策略操作。CAPTCHA 操作仅适用于 IP 信誉和设备指纹检测技术。以下是了解 CAPTCHA 如何工作的步骤:
- 如果在 IP 信誉或设备指纹机器人检测期间观察到安全违规,ADC 设备将发送 CAPTCHA 质询。
- 客户端发送 CAPTCHA 响应。
- 设备会验证 CAPTCHA 响应,如果验证码有效,则允许该请求并将其转发到后端服务器。
- 如果 CATCHA 响应无效,设备将发送新的 CAPTCHA 质询,直到达到最大尝试次数。
- 如果即使在最大尝试次数之后,CAPTCHA 响应仍然无效,则设备会丢弃或将请求重定向到配置的错误 URL。
- 如果您已配置日志操作,则设备会将请求详细信息存储在 ns.log 文件中。
使用 NetScaler GUI 配置 CAPTCHA 设置
机器人管理 CAPTCHA 操作仅支持 IP 信誉和设备指纹检测技术。完成以下步骤以配置 CAPTCHA 设置。
- 导航到安全 > NetScaler 机器人管理和配置文件。
- 在 NetScaler 机器人管理配置文件页面上,选择一个配置文件,然后单击编辑。
- 在 NetScaler 机器人管理配置文件页面上,转到签名设置部分,然后单击 CAPTCHA。
- 在 CAPTCHA 设置 部分中,单击 添加以将 CAPTCHA 设置配置 到配置文件:
- 在“配置 NetScaler 机器人管理 CAPTCHA”页面中,设置以下参数。
-
URL。在 IP 信誉和设备指纹检测技术期间应用 CAPTCHA 操作的机器人 URL。
- 已启用。设置此选项可启用 CAPTCHA 支持。
- 宽限时间。直到收到当前有效的验证码响应后没有发送新的 CAPTCHA 质询为止。
- 等待时间。ADC 设备等到客户端发送 CAPTCHA 响应所花费的时间。
- 静音期间。发送错误 CAPTCHA 响应的客户端必须等到允许下一次尝试之前的持续时间。在此静音期间,ADC 设备不允许任何请求。射程:60—900 秒,建议:300 秒
- 请求长度限制。向客户端发送 CAPTCHA 质询的请求的长度。如果长度大于阈值,则会丢弃请求。默认值为 10—3000 字节。
- 重试尝试次数。允许客户端重试解决 CAPTCHA 挑战的次数。射程:1—10,推荐:5。
- 如果客户端未通过 CAPTCHA 验证,则不会采取任何操作/丢弃/重定向操作。
- 日志。设置此选项可在响应 CAPTCHA 失败时存储来自客户端的请求信息。数据存储在
ns.log文件中。 - 评论。关于 CAPTCHA 配置的简要说明。
-
- 单击 确定 并 完成 。
- 导航到“安全”>“NetScaler 机器人管理”“签名”。
- 在 NetScaler 机器人管理签名页面上,选择签名文件并单击“编辑”。
- 在 NetScaler 机器人管理签名页面上,转到“签名设置”部分,然后单击“机器人签名”。
-
在 机器人签名 部分中,设置以下参数:
- 配置 静态签名。选择一个机器人静态签名记录,然后单击编辑为其分配机器人操作。
- 单击确定。
- 单击 更新签名。
- 单击 Done(完成)。
每秒机器人交易量 (TPS)
如果每秒请求数 (RPS) 和 RPS 的增加百分比超过配置的阈值,则每秒事务数 (TPS) 机器人技术将传入流量检测为自动程序。该检测技术可保护您的 Web 应用程序免受可能导致 Web 抓取活动、暴力强制登录和其他恶意攻击的自动漫程序的侵害。
注意:
只有在配置了两个参数并且两个值都超过阈值限制时,机器人技术才会将传入流量检测为机器人。 让我们考虑一种情况,在这种情况下,设备会收到来自特定 URL 的许多请求,并且您希望 NetScaler 机器人管理部门检测是否存在机器人攻击。TPS 检测技术会检查 1 秒内来自 URL 的请求数(配置值)以及 30 分钟内收到的请求数的增加百分比(配置值)。如果这些值超过阈值限制,则流量将被视为机器人,设备将运行配置的操作。
要配置 TPS,必须完成以下步骤:
- 启用机器人 TPS
- 将 TPS 设置绑定到机器人管理配置文件
使用 CLI 配置每秒机器人交易量 (TPS)
启用每秒机器人交易 (TPS)
在开始之前,必须确保设备上启用了机器人 TPS 功能。在命令提示符下,键入:
set bot profile profile1 –enableTPS ON
将 TPS 设置绑定到机器人管理配置文件
启用机器人 TPS 功能后,必须将 TPS 设置绑定到机器人管理配置文件。
在命令提示符下,键入:
bind bot profile <name>… (-tps [-type ( SourceIP | GeoLocation | RequestURL | Host )] [-threshold <positive_integer>] [-percentage <positive_integer>] [-action ( none | log | drop | redirect | reset | mitigation )] [-logMessage <string>])
示例:
bind bot profile profile1 -tps -type RequestURL -threshold 1 -percentage 100000 -action drop -logMessage log
使用 NetScaler GUI 配置每秒机器人事务 (TPS)
完成以下步骤以配置每秒机器人事务数:
- 导航到安全 > NetScaler 机器人管理 > 配置文件。
- 在 NetScaler 机器人管理配置文件页面中,选择一个配置文件,然后单击编辑。
- 在“创建 NetScaler 机器人管理配置文件”页面中,单击“签名设置”部分下的 TPS。
- 在 TPS 部分中,启用该功能,然后单击 添加。
-
在配置 NetScaler 机器人管理配置文件 TPS 绑定页面中,设置以下参数。
-
类型-检测技术允许的输入类型。可能的值:SOURCE IP、 GEOLOCATION、HOST、URL。
SOURCE_IP — 基于客户端 IP 地址的 TPS。
GEOLOCATION — 基于客户的地理位置的 TPS。
HOST - 基于转发到特定后端服务器 IP 地址的客户端请求的 TPS。
URL — 基于来自特定 URL 的客户端请求的 TPS。
-
固定阈值-在 1 秒的时间间隔内,TPS 输入类型允许的最大请求数。
-
百分比阈值-来自 TPS 输入类型的请求在 30 分钟时间间隔内增加的最大百分比。
-
操作-对被 TPS 绑定检测到的机器人采取的操作。
-
日志-启用或禁用 TPS 绑定的日志记录。
-
日志消息。TPS 绑定检测到的要记录的机器人的消息。最大长度:255。
-
注释-关于 TPS 配置的简要描述。最大长度:255
-
- 单击 确定 ,然后单击 关闭。
共享
共享
This Preview product documentation is Cloud Software Group Confidential.
You agree to hold this documentation confidential pursuant to the terms of your Cloud Software Group Beta/Tech Preview Agreement.
The development, release and timing of any features or functionality described in the Preview documentation remains at our sole discretion and are subject to change without notice or consultation.
The documentation is for informational purposes only and is not a commitment, promise or legal obligation to deliver any material, code or functionality and should not be relied upon in making Cloud Software Group product purchase decisions.
If you do not agree, select I DO NOT AGREE to exit.